1. ヨー(Yaw)軸について
ヨー(Yaw)軸は follow モードのみ必要で、360度の回転をする必要はありません。
なぜなら私の場合、FPV を使い Manual Mode も使うので、カメラは常に前方を向いていることが必須だからです。もしジンバルを180 度回転などさせたらどっちが前か分からなくなります。したがってヨー(Yaw)軸については、直進時や左右回転時のぶれをなくす目的で follow モードのみ使います(なお360度回転の設定も可能です)。
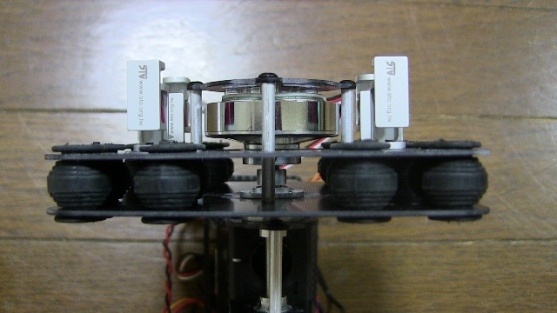
2. 組み立て、バランス
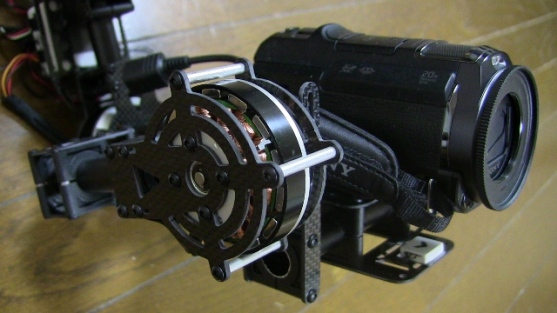
組み立てました。ピッチ(チルト)およびロールのモーターは iFlight製 iPower GBM5208-150T、ヨー(Yaw)のモーターはメーカー不明 4008(ジンバルキッド小用)です。ジンバルキッドは基本的に小を使いピッチ、ロールのモーター部分および台の側面に大を使っています。GBM5208-150T は十分過ぎるほどのパワーがあります。
カメラを除いたジンバルの重さは 1005g です(これが問題、以前のジンバルより 460g 重くなります。対応は次回以降)。
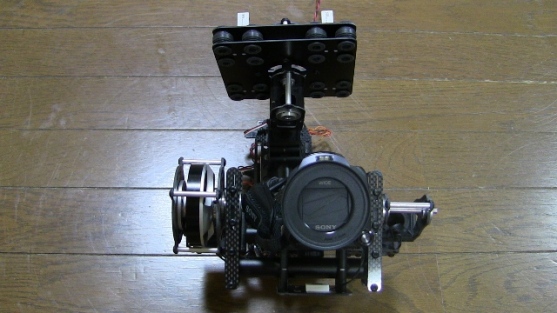
幅を狭めて全てのバランスをとります。

ご注意:GoodLuckBuy で購入したジンバルキッドを使う場合、iPower GBM5208-150T(2個)と 4008(1個)のモーターも GoodLuckBuy で購入する必要があります。他で購入すると取り付け穴の間隔が合わないからです。
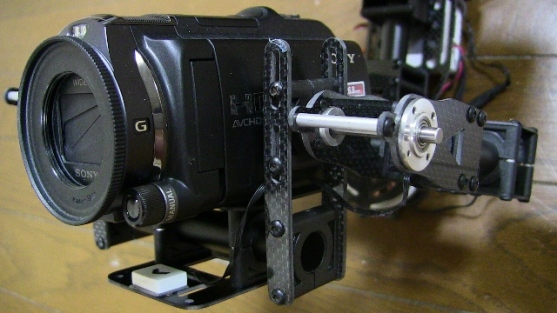
軽量化のために後日こちら側のアームを取り外すかもしれません(強度とバランスに問題がなければ)。
YUN-I adapter for 3rd axis expansion board は力を入れすぎると壊れるのでそーっと扱います(写真には写っていません)。
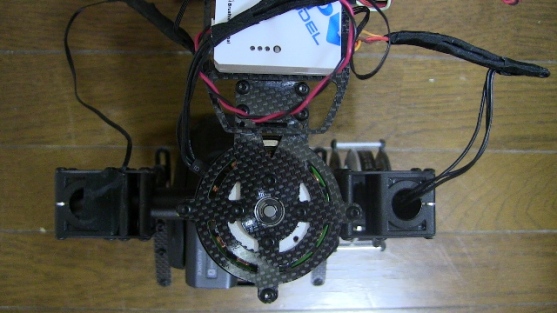
防振部分です。
3. Setting
Alexmos Simple Brushless Controller(YUN-1)のソフト設定
(1) まずUSBを認識する FTDI USB Driver をダウンロードおよびインストールします(FPV MODEL からダウンロードした Assistant_ver_1.0.0.0 内の FTDI USB Driver フォルダにはインストール用ファイルがありません、と思います)。
http://www.ftdichip.com/Drivers/VCP.htm からダウンロードします(Google で FTDI USB Driver と検索)。Windows なら 2013-08-01 リリースの 2.08.30 をダウンロードしてインストールします。
(2) 次に USB を接続します。そして使用するCOMポート番号を見つけます。具体的にはデバイスマネージャーを開き、ポート(COMとLPT)の+をクリックし、USB Serial Port と表示されるCOMポート番号を使用します(デバイスマネージャー表示方法:Windows7以上はコントロールパネルのデバイスマネージャーをクリック、古いWindowsではコントロールパネルのシステムをクリック→システムのプロパティ画面を表示したらWindowsXPや2000ではハードウェアタブをクリック→デバイスマネージャ(D)ボタンをクリック。WindowsVistaでは画面左上のタスク欄にあるデバイスマネージャをクリック)。
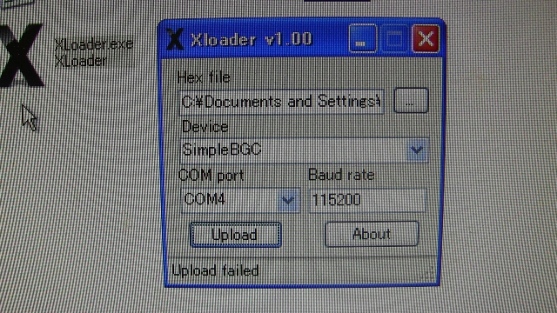
(3) XLoader.exe を開いて Firmware SimpleBGC_2_2b2.enc.hex をアップデートします(現状最新バージョンは Aleksey Moskalenko さんのHP http://www.simplebgc.com/eng/downloads/ にしかありません)。左下の Upload Failed は無視します。これでアップデートは成功しているはずです(古いパソコン画面を写しているので写真が汚い!)。
(4) Aleksey Moskalenko さんのHPからダウンロードした Simple BGC GUI v2.2 b2 を開きます。Firmware を確認してください。そしてまず左下の USE DEFAULTS をクリックし、Gyro のキャリブレーション(1方向毎に CALIB.ACC をクリック、計6方向で6回クリック)を行います。ここまでバッテリーを繋いではいけません。
詳細は以下の Aleksey Moskalenko さんの動画をご参照ください。
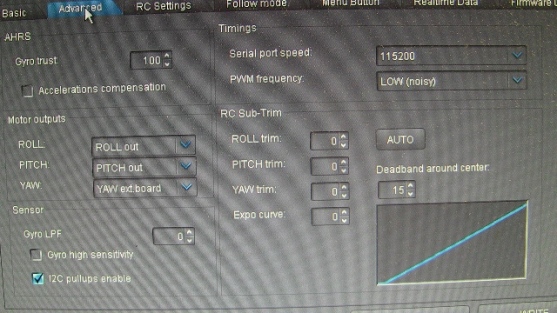
(5) 次にバッテリーを繋いで Advansed 画面の左真ん中 YAW を YAW ext.board にして、左下の 12C pullups enable にチェックしてください(写真が汚い!)。
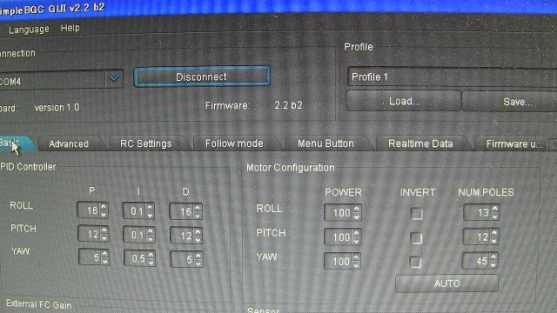
(6) Basic 画面に戻って写真の数字をとりあえず入力します。
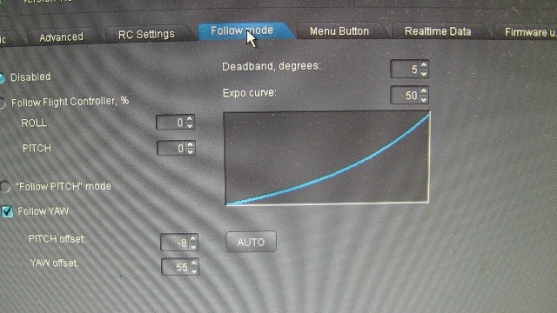
(7) さらに Follow mode 画面で写真の数字を入力してください。Deadband, degrees 5 は Yaw 軸左右5度までのブレをジンバルで吸収して動かないようにするという意味です(つまり機体直進時の左右の揺れを吸収します)。offset(スタート時の位置調整)数字は皆様ご自由に。
以上でセッティング完了です(Yaw セッティングはさらに詰めます)。もしブルブル震えたら Basic 画面の数字を小さくしてください。それにしても写真が汚い。なお製作費は7万円弱です。
本来30万円程度の 3Axis Brushless Gimbal for DSLR Size を7万円で作ることができました(幅を狭めて組み立てただけ)。皆様も自作して、浮いた23万円で遊びましょう。